Google Tango Hackathon in Timisoara
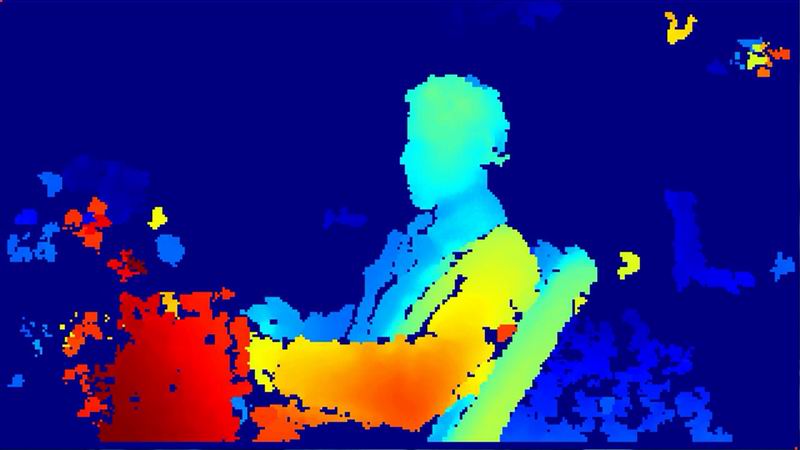
Some impressions on the Google Tango Hackathon held in Timisoara in April 2014. See one of the Winner projects, the Camera 3D and some insight on the new device from Google.
Robotics related: various platforms, motors, and other details related to how to build a robot, including artificial vision, autonomous movement, and programming details.
Some impressions on the Google Tango Hackathon held in Timisoara in April 2014. See one of the Winner projects, the Camera 3D and some insight on the new device from Google.
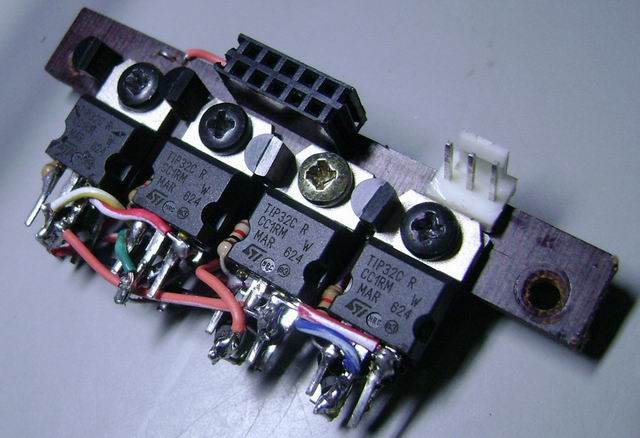
Build a dual H-bridge board to control two motors.

Learn how to transform your HD44780 LCD into a easy to use, serial LCD, that you can connect to your microcontroller using only 3 wires! It’s time to save a few pins, and expand your project’s functionality!

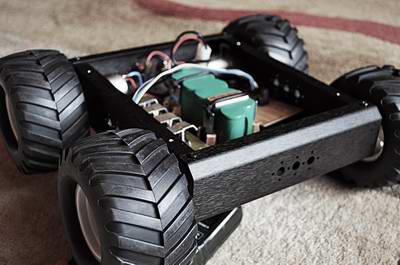
Building an autonomous robot using a rover platform and advanced electronics is not an easy job. Kevin asked me to build a robot that would follow its user. A companion, very much like a robo-dog. See the project log here.
Learn to connect a bluetooth module to an ATMega micro controller via the UART serial interface and even further, discover it using a bluetooth enabled Android phone. The 9600bps serial link established, can than be used to exchange data: read sensors or control the robot.
An article about a differential Arduino robot by Rodrigo Nascimento Hernandez

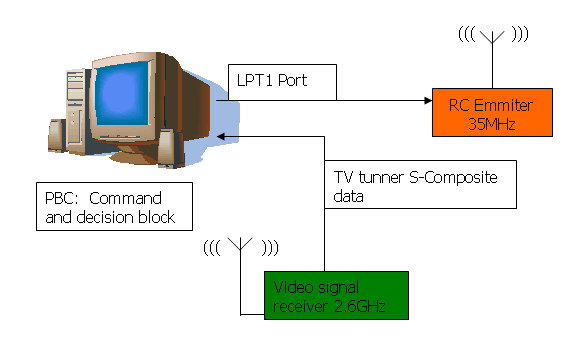
Perseus 3, a 4×4 advanced robot featuring an Atmega8 for sensor interfacing and motor control, and a I-mate SP5 smartphone (200MHz) running Windows Mobile 6.0 as robot’s brain. Small weight, powerful trust, and lots of features including WLAN, Bluetooth, Camera, Speaker, Phone-interface (GPRS, 3G), Microphone (for voice commands) and more.

A new differential robot platform, with strong gear motors and low power consumption.
A not-so-short article on various robot platforms I’ve experimented with. See my latest designs, and learn about my findings on robotics.